Abstrak
Emulator AI untuk peramalan telah muncul sebagai alat yang ampuh yang dapat mengungguli prediksi numerik konvensional. Batas berikutnya adalah membangun emulator untuk simulasi iklim jangka panjang dengan keterampilan di berbagai skala spasiotemporal, tujuan yang sangat penting bagi lautan. Pekerjaan kami membangun emulator global yang terampil dari komponen lautan dari model iklim mutakhir. Kami meniru variabel lautan utama, tinggi permukaan laut, kecepatan horizontal, suhu, dan salinitas, di seluruh kedalamannya. Kami menggunakan arsitektur ConvNeXt UNet yang dimodifikasi yang dilatih pada berbagai tingkat kedalaman data lautan. Kami menunjukkan bahwa emulator lautan— Samudra —yang tidak menunjukkan pergeseran relatif terhadap kebenaran, dapat mereproduksi struktur kedalaman variabel lautan dan variabilitas antartahunannya. Samudra stabil selama berabad-abad dan 150 kali lebih cepat daripada model lautan asli. Samudra berjuang untuk menangkap besarnya tren pemaksaan yang benar dan sekaligus tetap stabil, yang membutuhkan pekerjaan lebih lanjut.
Poin-poin Utama
- Kami mengembangkan emulator pembelajaran mesin autoregresif laut 3D global untuk studi iklim
- Emulator, berdasarkan arsitektur UNet, stabil selama berabad-abad, menghasilkan klimatologi dan variabilitas variabel laut yang akurat
- Pelatihan emulator kuat terhadap perubahan benih dan kondisi awal dalam data
Ringkasan Bahasa Sederhana
Alat AI sangat efektif dalam membuat prediksi cuaca yang cepat dan akurat hingga rentang waktu musiman. Menangkap perubahan dari dekade ke abad, yang muncul dari dinamika lautan, tetap menjadi tantangan yang luar biasa. Kami membangun model AI canggih yang disebut “Samudra” untuk mensimulasikan perilaku lautan global. Samudra dilatih pada data simulasi dari model iklim lautan canggih dan memprediksi fitur-fitur utama lautan seperti tinggi permukaan laut, arus, suhu, dan salinitas di seluruh kedalaman lautan. Samudra dapat secara akurat menciptakan kembali pola dalam variabel lautan, termasuk perubahan dari tahun ke tahun. Ia stabil selama berabad-abad dan 150 kali lebih cepat daripada model lautan tradisional. Namun, Samudra masih menghadapi tantangan dalam menyeimbangkan stabilitas dengan memprediksi secara akurat dampak faktor eksternal (seperti tren iklim), dan perbaikan lebih lanjut diperlukan untuk mengatasi keterbatasan ini.
1 Pendahuluan
Keberhasilan emulator baru-baru ini untuk komponen sistem iklim, terutama atmosfer, terus menghasilkan hasil yang luar biasa, mencapai kinerja canggih untuk tugas prediksi cuaca (Bi et al., 2023 ; Kochkov et al., 2024 ; Price et al., 2023 ) dan hasil yang menjanjikan dalam mereproduksi model iklim selama skala waktu dekade (Cachay et al., 2024 ) hingga multi-dekade (Watt-Meyer et al., 2023 ).
Pekerjaan yang ada pada emulasi samudra sebagian besar terbatas pada permukaan dan samudra bagian atas, atau pada pemaksaan tetap. Beberapa pekerjaan yang berfokus pada variabel samudra permukaan menunjukkan hasil untuk skala waktu tahun hingga satu dekade (Dheeshjith et al., 2024 ; Gray et al., 2024 ; Subel & Zanna, 2024 ). Emulator yang menyertakan informasi bawah permukaan telah berfokus pada skala waktu mingguan hingga dekade dan paling banyak 1.000 tahun ke atas.
(Arcomano et al., 2023 ; Guo et al., 2024 ; Holmberg et al., 2024 ; Patel et al., 2024 ; Xiong et al., 2023 ). Bire et al. ( 2023 ) mengeksplorasi skala waktu yang lebih panjang dalam model samudra yang disederhanakan dengan pemaksaan stabil yang diidealkan. Akhirnya, emulator atmosfer-samudra yang digabungkan secara musiman telah menunjukkan hasil yang menjanjikan, dengan mempertimbangkan 300
lautan (Wang et al., 2024 ). Emulator lautan dan atmosfer ini telah digunakan untuk prakiraan musiman berdasarkan data analisis ulang, dan untuk membangun pengganti model numerik.
Emulator model iklim numerik tradisional memanfaatkan efisiensi komputasi pendekatan pembelajaran mesin untuk mengurangi biaya komputasi yang seringkali mahal dalam menjalankan sejumlah besar simulasi pada model iklim asli (biasanya berbasis CPU). Salah satu manfaat utama emulator adalah kemampuan untuk menjalankan ensemble besar. Ensemble tersebut dapat digunakan untuk menyelidiki kemungkinan kejadian ekstrem, mengeksplorasi respons iklim terhadap berbagai skenario pemaksaan (misalnya, gas rumah kaca), dan memfasilitasi pengembangan model numerik dengan mengurangi jumlah eksperimen parameter terganggu yang biasanya digunakan untuk kalibrasi (Maher et al., 2021 ; Mahesh et al., 2024 ). Emulator juga dapat mempercepat integrasi spin-up model numerik atau mengganti komponen model penuh dalam pengaturan yang digabungkan (Khatiwala, 2024 ). Akhirnya, emulator dapat membantu asimilasi data, mengganti model numerik yang mahal dengan pengganti yang cepat untuk menghasilkan ensemble yang terjangkau atau adjoint perkiraan, mempertahankan akurasi dengan biaya yang berkurang (Manshausen et al., 2024 ).
Sasaran kami di sini adalah untuk mereproduksi kondisi laut dengan kedalaman penuh untuk empat variabel prognostik 3D dan satu 2D, menggunakan pemaksaan atmosfer realistis yang bergantung waktu sebagai masukan, memperluas karya Subel dan Zanna ( 2024 ); Dheeshjith dkk. ( 2024 ). Pada durasi peluncuran hampir satu dekade, emulator kami menunjukkan keterampilan yang cukup besar di beberapa diagnostik utama (rata-rata dan varians) jika dibandingkan dengan keluaran model numerik induk, yang merupakan kebenaran dasar kami. Secara khusus, baik struktur suhu sebagai fungsi kedalaman dan variabilitas El Niño-Southern Oscillation (ENSO) direproduksi dengan baik oleh emulator.
Menangkap variabel secara bersamaan dengan rentang waktu yang sangat berbeda, seperti kecepatan (yang dapat mengandung fluktuasi cepat) dan salinitas (yang biasanya berfluktuasi lebih lambat), merupakan masalah yang menonjol untuk integrasi yang panjang (sudah ditemukan oleh Subel dan Zanna ( 2024 )). Untuk mengatasi masalah ini, kami memperkenalkan emulator tambahan dengan berfokus pada variabel termodinamika (yaitu, suhu potensial dan salinitas saja). Emulator tambahan ini menangkap perubahan suhu potensial dan salinitas yang berubah secara perlahan pada rentang waktu puluhan tahun hingga berabad-abad.
Kami menunjukkan bahwa emulator kami dapat mempertahankan keterampilan dan tetap stabil selama berabad-abad untuk eksperimen yang setara dengan simulasi kontrol dan perubahan iklim. Namun, kami juga mencatat bahwa stabilitas ini disertai dengan respons yang lemah terhadap pemaksaan perubahan iklim. Karya ini menunjukkan (sejauh pengetahuan kami) emulator samudra pertama yang mampu mereproduksi struktur suhu samudra sedalam-dalamnya (dari permukaan hingga dasar samudra) dan variabilitasnya, sambil berjalan selama beberapa abad dalam konfigurasi realistis dengan pemaksaan yang bergantung pada waktu.
Makalah ini disusun sebagai berikut. Kami membahas data dan semua detail emulator di Bagian 2. Kami mengeksplorasi properti emulator yang dilatih pada set data uji dan melaporkan beberapa eksperimen multi-dekade dengan berbagai pemaksaan iklim di Bagian 3. Kami menyajikan kesimpulan kami di Bagian 4 .
2 Metode
Kami membangun emulator laut autoregresif dari data yang dihasilkan oleh simulasi laut numerik yang canggih. Di bawah ini, kami menjelaskan data, emulator, arsitektur, serta pelatihan dan evaluasi emulator.
2.1 Data
Data dihasilkan oleh OM4 (Adcroft et al., 2019 ), model sirkulasi umum samudra yang merupakan komponen samudra dari model iklim gabungan tercanggih CM4 (Held et al., 2019 ). Model sirkulasi diinisialisasi dengan hidrografi dari World Ocean Atlas (Levitus et al., 2015 ) dan dipaksa dengan analisis ulang atmosfer, mengikuti protokol OMIP-2, dengan versi 1.4 dari Analisis Ulang Atmosfer Jepang (Tsujino et al., 2020 ). Model dijalankan selama 65 tahun (1958–2022).
2.2 Emulator Laut
Variabel dalam emulator laut adalah:


2.3 Arsitektur
Emulator ini didasarkan pada arsitektur ConvNeXt UNet dari (Dheeshjith et al., 2024 ), di mana blok inti UNet (Ronneberger et al., 2015 ) terinspirasi oleh blok ConvNeXt (Liu et al., 2022 ) yang diadaptasi dari (Karlbauer et al., 2023 ). UNet mengimplementasikan downsampling berdasarkan pengumpulan rata-rata dan upsampling berdasarkan interpolasi bilinear, yang memungkinkannya mempelajari fitur pada berbagai skala. Setiap blok ConvNext mencakup aktivasi GeLU, peningkatan laju dilatasi, dan kemacetan saluran terbalik. Kami tidak menggunakan kedalaman saluran terbalik dan mengganti kedalaman saluran terbalik yang besar.
kernel dengan
kernel. Kami menggunakan normalisasi batch alih-alih normalisasi layer, karena menghasilkan keterampilan yang lebih baik. Encoder dan decoder terdiri dari empat blok ConvNeXt, masing-masing dengan lebar kanal [200, 250, 300, 400]. Laju dilatasi yang digunakan untuk encoder dan decoder adalah [1, 2, 4, 8]. Selain itu, kami menyertakan satu blok ConvNext (dengan lebar kanal 400 dan dilatasi 8) di bagian terdalam UNet sebelum upsampling. Jumlah total parameter model adalah 135 M. Kami menerapkan padding periodik (atau melingkar) dalam arah longitudinal dan padding nol di kutub seperti pada (Dheeshjith et al., 2024 ).
2.4 Rincian Pelatihan
Kami mengilustrasikan pelatihan model dalam (Gambar 1a ). Kami melatih emulator menggunakan 2.900 sampel data yang sesuai dengan rentang 1975-01-03 hingga 2014-09-20 dengan 50 sampel terakhir digunakan untuk validasi. Setiap sampel adalah rata-rata 5 hari dari kondisi lautan penuh dan kondisi batas atmosfer.
Kami mengabaikan data selama 1958–1975 karena pendinginan model yang berlebihan, sementara data tersebut disesuaikan dari kondisi awal yang hangat. Pendinginan ini tidak mencerminkan pemaksaan tetapi lebih merupakan penyesuaian model lautan interior (lihat Sane et al. ( 2023 ) dan Gambar S3 dalam Informasi Pendukung S1 ). Perhatikan bahwa beberapa wilayah masih mendingin pasca-1975 dalam simulasi ini, yang memengaruhi sebagian pengujian kami (lihat hasil).
Fungsi kerugian yang digunakan untuk optimasi adalah
2.5 Evaluasi
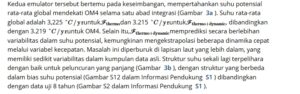
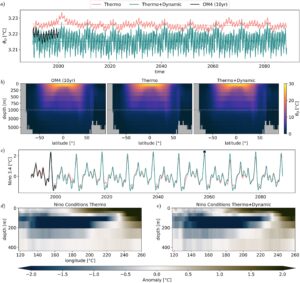
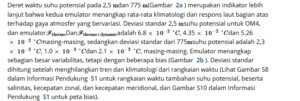
Untuk mengevaluasi emulator, kami mengambil kondisi awal dari 2014-09-30 dan menghasilkan peluncuran 8 tahun menggunakan pemaksaan atmosfer yang sesuai. Kami membandingkan keluaran dari peluncuran ini dengan data OM4 yang ditahan untuk mengevaluasi keterampilan emulator. Selain itu, kami menghasilkan uji coba yang lebih lama untuk menilai respons emulator, mirip dengan simulasi kontrol, dengan peluncuran yang sangat lama. Emulator dipaksa dengan kondisi batas atmosfer yang diambil dari tahun 1990 hingga 2000, dengan siklus 10 tahun yang berulang. Periode ini dipilih secara khusus karena memiliki pemaksaan fluks panas terintegrasi global yang mendekati nol, yang memastikan pergeseran samudra minimal. Kami juga melakukan uji coba kontrol 100 tahun dan 400 tahun (lihat Informasi Pendukung S1 ).
3 Hasil
3.1 Emulator Laut Global Kedalaman Penuh
3.2 Stabilitas Jangka Panjang
Kami juga mengevaluasi kemampuan emulator untuk menghasilkan eksperimen kontrol yang panjang, tanpa pelatihan ulang. Untuk eksperimen ini, kami menggunakan kondisi batas berulang selama 10 tahun (dijelaskan dalam Bagian 2.5 ) yang dipilih untuk memberikan fluks panas bersih mendekati nol, yang memungkinkan emulator untuk berjalan dalam jangka waktu yang lama tanpa batas sambil meminimalkan potensi pergeseran suhu.